graphfinder¶
Graph traversal & pathfinding with a compute core in Rust and an API in Python. It covers both uninformed search (BFS, DFS, UCS/Dijkstra) and informed search (Greedy, A*, Weighted A*, IDA*, beam), and it is built for teaching: every algorithm is the same loop, and you can watch it run.
A* exploring a maze — blue is the expanded frontier, gold is the final
path. One line of Python: gf.viz.animate_grid(maze, result).
Install¶
Thirty seconds¶
import graphfinder as gf
r = gf.search(gf.sample_maze("wall"), algorithm="astar", heuristic="manhattan")
print(r) # SearchResult(found=True, cost=20, expanded=25, frontier=3, stop=goal)
The one idea¶
Every algorithm here is the same loop — Russell & Norvig's GENERAL-SEARCH —
differing only in the frontier (which node comes out next) and the
evaluation function priority = g_coeff·g(n) + h_coeff·h(n):
| Algorithm | Frontier | g_coeff |
h_coeff |
Optimal? |
|---|---|---|---|---|
| BFS | FIFO queue | 1 | 0 | only on unit costs |
| DFS | LIFO stack | 1 | 0 | no |
| UCS/Dijkstra | min-priority | 1 | 0 | yes |
| Greedy | min-priority | 0 | 1 | no |
| A* | min-priority | 1 | 1 | yes (admissible h) |
| Weighted A* | min-priority | 1 | w | within w× optimal |
Run the same maze through each and the difference is immediate:
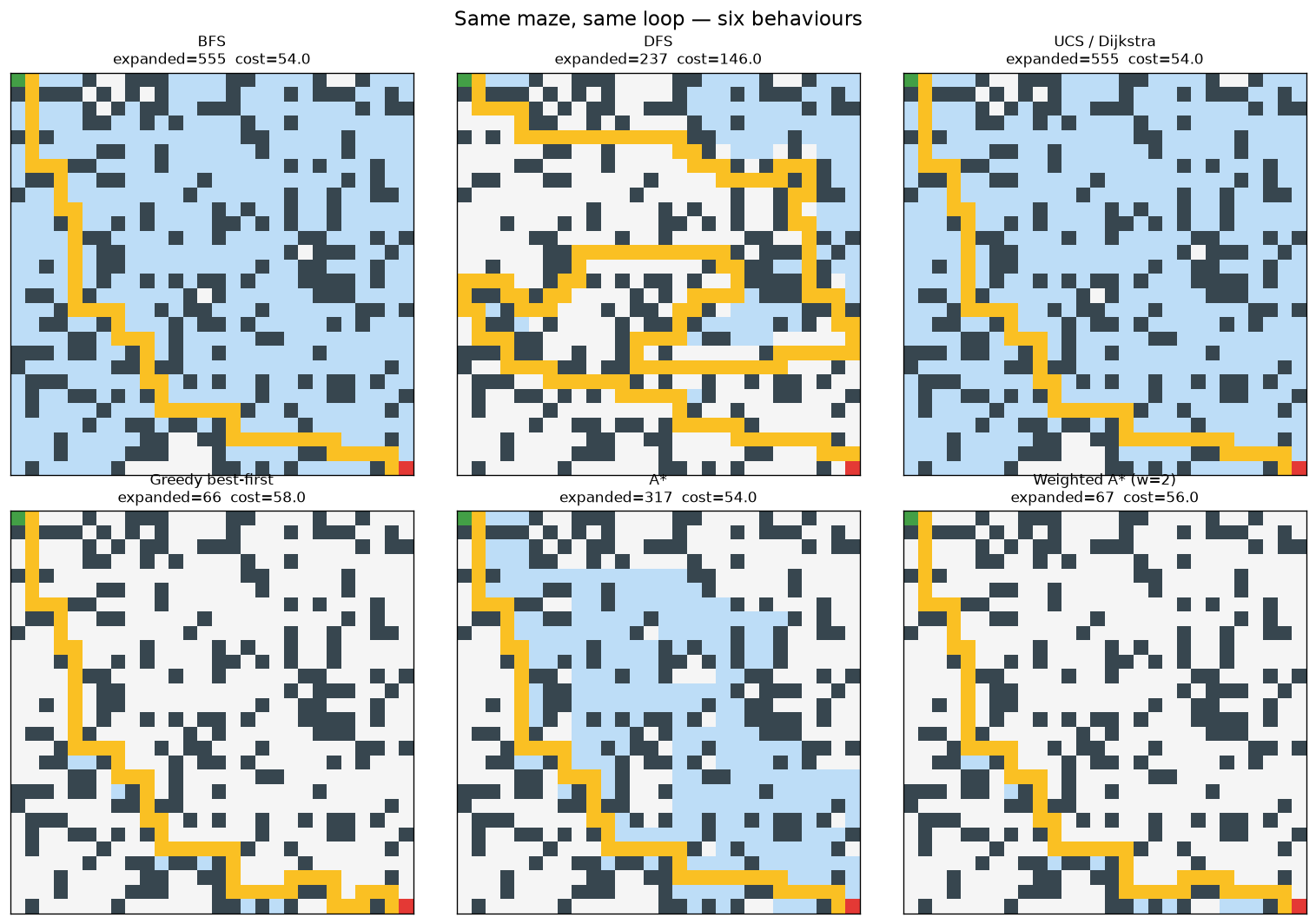
BFS and UCS flood the whole map; DFS wanders to a long path; Greedy beelines but overshoots the optimum; A* gets the optimal cost while exploring a fraction of what UCS does; Weighted A* trades a little optimality for even less work.
What's inside¶
- Uninformed: BFS, DFS, UCS/Dijkstra, depth-limited (DLS), iterative deepening (IDDFS), bidirectional BFS.
- Informed: Greedy best-first, A*, Weighted A*, IDA*, beam search.
- Negative weights: Bellman–Ford (single-source, with negative-cycle detection) and Floyd–Warshall (all-pairs) — for the graphs Dijkstra/A* can't handle.
- Domains: grid/maze worlds, explicit weighted graphs (CSR), implicit graphs via a Python successor callable, and random-graph generators (Erdős–Rényi, Barabási–Albert, Watts–Strogatz).
- Heuristics: zero, Manhattan, Euclidean, octile.
- Visualization: maze-search animation, static grids, frontier-size curves, work-vs-quality comparison, and general-graph plots.
- Instrumentation: every run reports the path, cost, nodes expanded/ generated, peak frontier, stop reason, and a per-step trace.
- Integrations: NetworkX, SciPy sparse adjacency, pandas DataFrames, OSMnx road networks, a safe LangChain routing tool, a Gymnasium GridWorld env with an A* oracle, and Graphviz export.
- Reproducibility: seeded generators and deterministic tie-breaking.
Where to next¶
- 🚀 Installation — pip, cargo, or build from source.
- 🧭 Getting started — mazes, graphs, implicit search.
- 📚 Tutorials — grids · comparison · graphs.
- 🧠 Concepts — algorithms · shortest paths · heuristics · domains.
- 🎬 Visualization gallery.
- 🔌 Integrations — NetworkX · SciPy · pandas.
- 🛠️ Design & internals and the API reference.
How is this different from networkx / rustworkx?¶
Those are excellent general graph libraries. graphfinder's niche is search pedagogy, step-by-step visualization and algorithm comparison, with a fast Rust core and GIL-free implicit state-space search (puzzles, large grids) as supporting features rather than the headline.
Author¶
graphfinder is created and maintained by Jose L. Salmeron (ORCID), CUNEF Universidad.
Citing¶
If you use graphfinder in academic work, please cite it — see the CITATION.cff
in the repository. Licensed under MIT © Jose L. Salmeron.