Heuristics¶
A heuristic h(n) estimates the remaining cost from a node to the goal. It is
what turns blind search into informed search: Greedy uses h alone, A* uses
g + h. A heuristic is admissible if it never overestimates the true
remaining cost — admissibility is what makes A* and IDA* optimal.
The heuristic= argument accepts either a built-in name (str) or a
custom Python callable h(node, goal) -> float — in any domain:
gf.search(maze, algorithm="astar", heuristic="manhattan") # built-in
gf.search(maze, algorithm="astar", heuristic=lambda n, g: abs(n[0]-g[0]) + abs(n[1]-g[1]))
Built-in grid heuristics¶
heuristic |
Formula | Use when | Admissible on… |
|---|---|---|---|
zero |
0 |
you want uninformed behaviour | always (A*→UCS) |
manhattan |
|Δrow| + |Δcol| |
4-connected grids | 4-connected unit grids |
euclidean |
√(Δrow² + Δcol²) |
any-angle / diagonal travel | always (under-estimates on grids) |
octile |
(L−S) + √2·S over the long/short legs |
8-connected grids | 8-connected grids with diagonal cost √2 |
zero makes any informed algorithm behave like its uninformed counterpart —
handy for A/B comparisons. On an 8-connected grid (diagonal=True), use
octile: it is the exact diagonal distance and stays admissible, whereas
manhattan would overestimate and lose A*'s optimality guarantee.
Weighted terrain
On a weighted grid the geometric heuristics
count steps, so they stay admissible only when every terrain cost ≥ 1
(the usual case). If costs can be below 1, a step-counting heuristic may
overestimate — use zero (→ Dijkstra) or scale the heuristic by the minimum
terrain cost to keep A* optimal.
Stronger heuristic, less work¶
The closer (but still admissible) the estimate, the more the search focuses on the goal and the fewer nodes it expands. Same maze, A* with three heuristics:
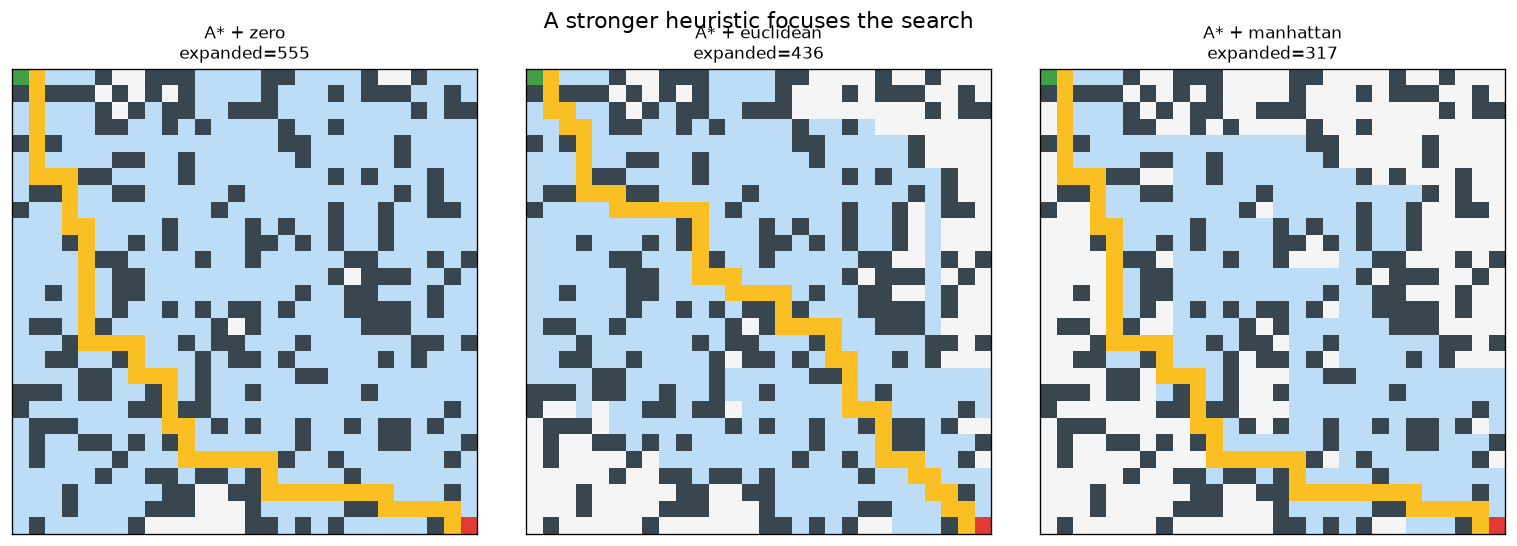
zero expands like UCS (floods the map); euclidean already narrows it;
manhattan — the tightest admissible estimate on a 4-connected grid — focuses
the search the most. All three return the same optimal cost; they differ only
in work.
Custom heuristics¶
Pass a callable h(node, goal) -> float instead of a name. The node and goal are
handed to your function in the domain's natural form, so the signature differs
per domain:
Nodes are (row, col) tuples. Here is a hand-written Chebyshev distance
(useful on 8-connected grids):
Nodes are integer ids. With coordinates per node you can use straight-line
distance to turn search_graph into a real A*:
States are ints or tuples of ints (whatever your successor function uses):
A custom callable works with every priority-based algorithm (greedy, astar,
weighted_astar, ida_star, beam). Built-in heuristics run in pure Rust with
the GIL released; a Python callable reacquires the GIL once per node it scores.
Designing one¶
- Keep it admissible for optimal A*/IDA*:
h(n) ≤ true remaining cost. - Make it consistent (
h(n) ≤ cost(n, n') + h(n')) and A* never needs to re-open a node — the strongest, best-behaved class. - Trade optimality for speed deliberately with
weighted_astar(weight=w): it inflateshbyw, returning a path at mostw×the optimum.
In Rust, a heuristic is a tiny trait impl:
use graphfinder_core::{Heuristic, Cell};
struct Chebyshev;
impl Heuristic<Cell> for Chebyshev {
fn estimate(&self, n: &Cell, goal: &Cell) -> f64 {
((n.row - goal.row).abs().max((n.col - goal.col).abs())) as f64
}
}
See Algorithms for how h enters the priority and
Visualization to see its effect.