Tutorial: comparing algorithms¶
The point of graphfinder is that the algorithms are the same loop — so comparing them is just a loop over names. This tutorial reproduces the headline figures.
Run every algorithm on one maze¶
import graphfinder as gf
maze = gf.random_maze_ascii(28, 28, 0.25, seed=2)
CONFIGS = [
("bfs", "zero"), ("dfs", "zero"), ("ucs", "zero"),
("greedy", "manhattan"), ("astar", "manhattan"),
("weighted_astar", "manhattan"),
]
for algo, h in CONFIGS:
r = gf.search(maze, algorithm=algo, heuristic=h, record=True)
print(f"{algo:16} cost={r.cost:6} expanded={r.nodes_expanded:5} "
f"frontier={r.max_frontier_size}")
Typical output (same maze):
bfs cost= 54.0 expanded= 555 frontier=...
dfs cost= 146.0 expanded= 237 frontier=...
ucs cost= 54.0 expanded= 555 frontier=...
greedy cost= 58.0 expanded= 66 frontier=...
astar cost= 54.0 expanded= 317 frontier=...
weighted_astar cost= 56.0 expanded= 67 frontier=...
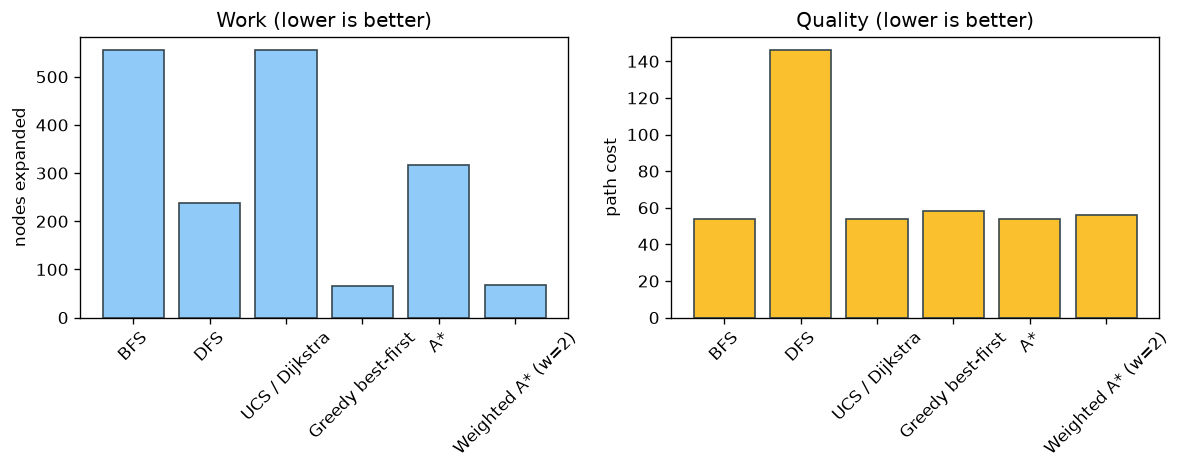
The story in one table: BFS/UCS are optimal but explore everything; DFS is cheap but its path is terrible; Greedy is cheapest to run but overshoots the optimum; A* is optimal and economical; Weighted A* gets near-optimal for almost Greedy-level work.
Visualize the trade-off¶
results = {name: gf.search(maze, algorithm=a, heuristic=h)
for (a, h), name in zip(CONFIGS, ["BFS","DFS","UCS","Greedy","A*","WA*"])}
gf.viz.compare(results)
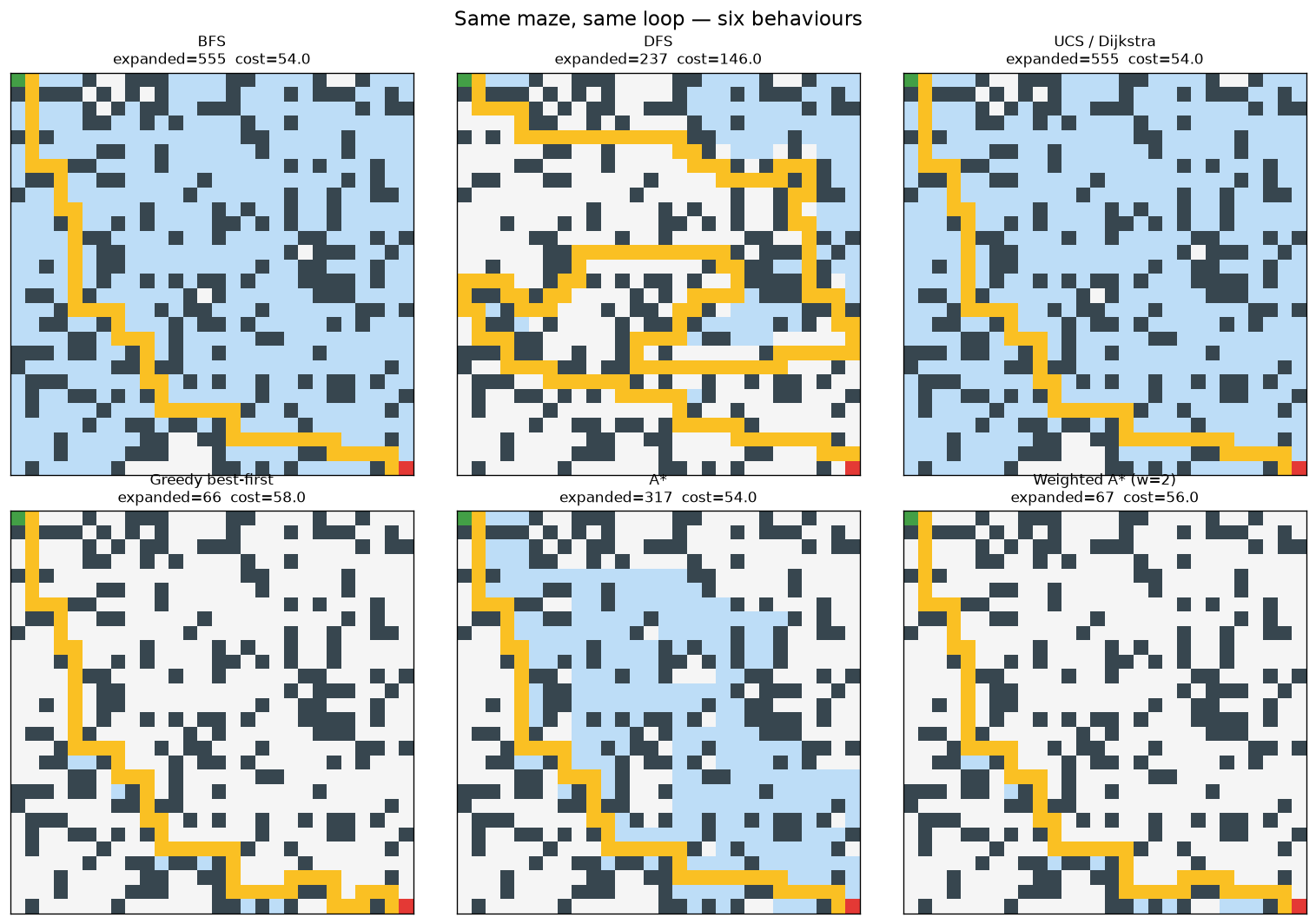
And the six explorations side by side:
import matplotlib.pyplot as plt
fig, axes = plt.subplots(2, 3, figsize=(13, 9))
for ax, (algo, h) in zip(axes.ravel(), CONFIGS):
r = gf.search(maze, algorithm=algo, heuristic=h, record=True)
gf.viz.plot_grid(maze, r, ax=ax)
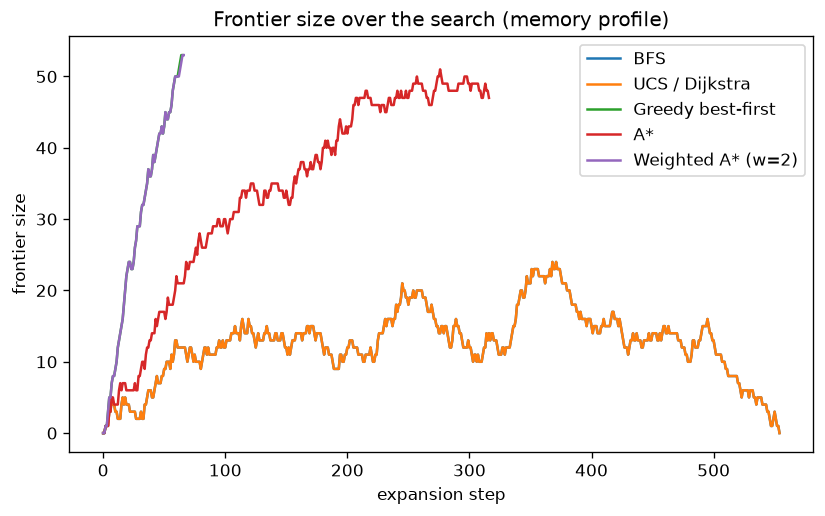
Memory profile¶
Frontier size over time separates the flood algorithms from the focused ones:
ax = None
for algo, h in [("bfs","zero"), ("ucs","zero"), ("greedy","manhattan"), ("astar","manhattan")]:
r = gf.search(maze, algorithm=algo, heuristic=h, record=True)
ax = gf.viz.plot_frontier(r, ax=ax, label=algo)
Bidirectional vs one-directional¶
bfs = gf.search(maze, algorithm="bfs", heuristic="zero", record=True)
bidi = gf.search(maze, algorithm="bidirectional", record=True)
print(bfs.nodes_expanded, "vs", bidi.nodes_expanded)
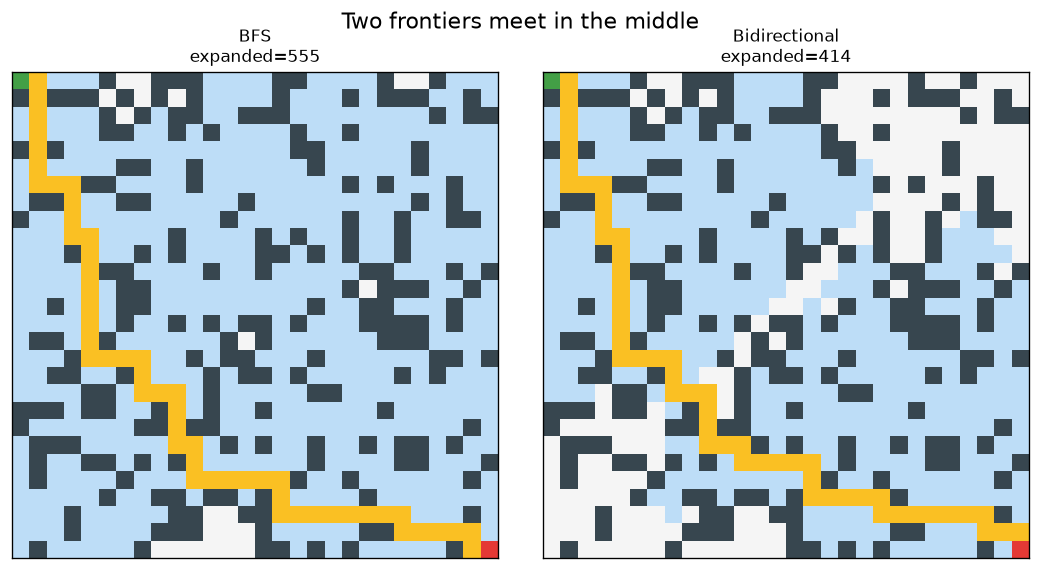
Two frontiers meeting in the middle expand far fewer nodes for the same optimal path.