Domains¶
A domain is the world you search over. graphfinder ships three, all behind the
same Graph trait, so every algorithm works on every domain.
Grids / mazes¶
A rectangular lattice of cells, each free or a wall. Nodes are (row, col);
orthogonal moves cost 1.0, diagonal moves (when enabled) cost √2. This is the
canonical pathfinding teaching domain and the one the animations
render.
maze = gf.sample_maze("wall") # built-in
maze = gf.random_maze_ascii(25, 25, 0.25, seed=0) # reproducible random
r = gf.search(maze, algorithm="astar", heuristic="manhattan", diagonal=False)
ASCII format: # wall · S start · G goal · anything else free.
The random generator does not guarantee solvability (so you can exercise the
"no path" case) — check r.found.
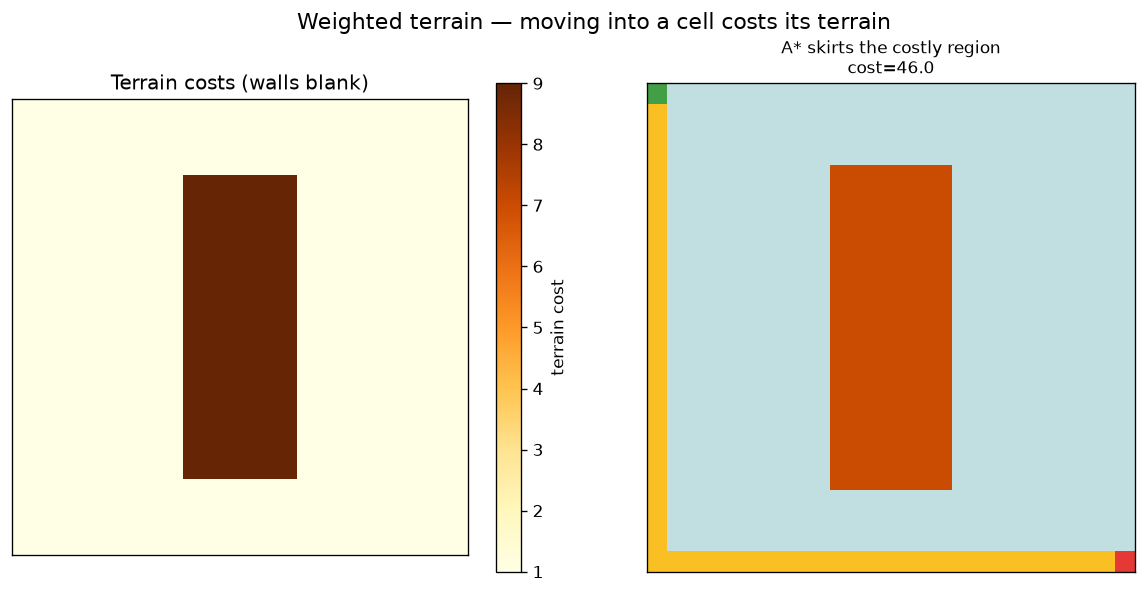
Weighted terrain¶
Cells are not just wall/free — every free cell has a terrain cost (default
1.0). Moving into a cell costs its terrain (× √2 for a diagonal step), so
on a weighted grid Dijkstra/A* genuinely differ from BFS: the cheapest path is
no longer the one with the fewest steps.
In an ASCII map, a digit 1–9 sets that cell's cost:
# Top row is expensive terrain (9); the bottom row is a cheap detour.
maze = "S99G\n1111"
gf.search(maze, algorithm="bfs").cost # 19.0 — fewest steps, but expensive
gf.search(maze, algorithm="ucs").cost # 5.0 — least cost, longer route
For arbitrary costs (beyond 1–9), pass a matrix to search_grid_costs; a cell
that is ≤ 0 or non-finite is treated as a wall:
costs = [
[1, 1, 1],
[9, 0, 1], # 0 ⇒ wall
[1, 1, 1],
]
r = gf.search_grid_costs(costs, start=(0, 0), goal=(2, 0), algorithm="astar")
Visualize the terrain and how A* skirts the expensive region:
Heuristics on weighted grids
manhattan/euclidean/octile count grid steps, so they stay admissible
only when every terrain cost ≥ 1 (the usual case). With sub-unit costs,
use zero (→ Dijkstra) or a heuristic scaled by the minimum cost. See
Heuristics.
Explicit weighted graphs¶
An adjacency structure held in memory (Compressed-Sparse-Row internally —
cache-friendly, the standard layout for large graphs). Nodes are integers
0..n; you provide an edge list (u, v, weight).
edges = [(0, 1, 1.0), (1, 2, 2.0), (0, 2, 4.0)]
r = gf.search_graph(3, edges, start=0, goal=2, algorithm="dijkstra")
print(r.cost) # 3.0 (0→1→2 beats the direct 0→2)
Random-graph generators¶
Reproducible (seeded) families, returned as edge lists ready for search_graph:
| Generator | Models | Signature |
|---|---|---|
gen_erdos_renyi(n, p, seed) |
uniform random edges | G(n, p) |
gen_barabasi_albert(n, m, seed) |
scale-free / hubs | preferential attachment |
gen_watts_strogatz(n, k, beta, seed) |
small-world | rewired ring lattice |
edges = gf.gen_barabasi_albert(90, 2, seed=3)
r = gf.search_graph(90, edges, 0, 89, algorithm="bfs", record=True)
gf.viz.plot_graph(90, edges, r)
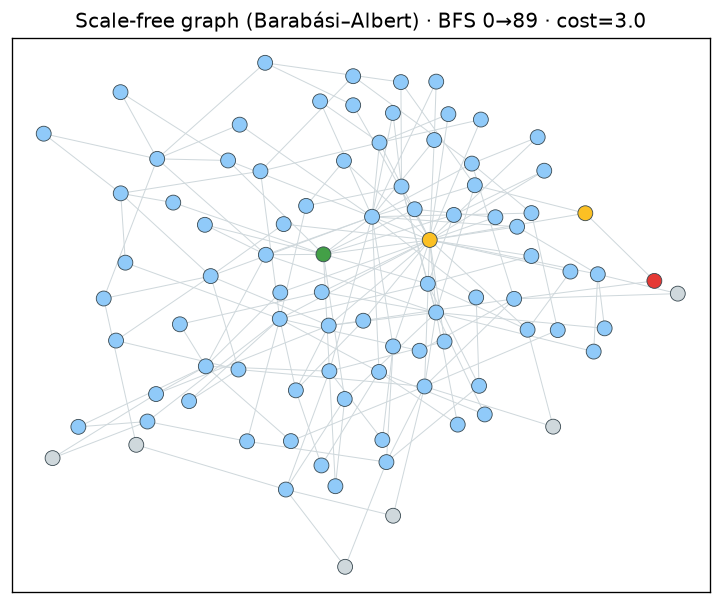
Nodes are coloured by their role in the search: grey = untouched, blue = expanded, gold = on the path, green/red = start/goal.
Implicit graphs (state spaces)¶
The graph that is never materialized — its successors are generated on demand. This is how classic puzzles are searched (you cannot store every state of a 15-puzzle), and where the Rust core's GIL-free expansion shines.
Provide a successor function; states are ints or tuples of ints:
# Word-ladder-style / arithmetic reachability
def successors(s):
return [(s + 1, 1.0), (s * 2, 1.0)] if s < 1000 else []
r = gf.search(successors, start=1, goal=27, algorithm="bfs")
Because the state is an arbitrary tuple, you can encode puzzle boards, register machines, or any transition system. Pair it with a custom heuristic callable for A*/IDA*.
Writing a new domain (Rust)¶
A domain is one trait method — return each successor and its edge cost:
use graphfinder_core::Graph;
struct Knight; // a chessboard knight's moves
impl Graph for Knight {
type Node = (i32, i32);
fn neighbors(&self, &(r, c): &(i32, i32)) -> Vec<((i32, i32), f64)> {
const D: [(i32, i32); 8] =
[(1,2),(2,1),(-1,2),(-2,1),(1,-2),(2,-1),(-1,-2),(-2,-1)];
D.iter().map(|(dr, dc)| ((r + dr, c + dc), 1.0)).collect()
}
}
Every algorithm in the library now works on Knight unchanged. See
Design & internals.